Students can Download Chapter 3 Principles of Inheritance and Variation Notes, Plus Two Zoology Notes helps you to revise the complete Kerala State Syllabus and score more marks in your examinations.
Kerala Plus Two Zoology Notes Chapter 3 Principles of Inheritance and Variation
Mendel’s Laws Of Inheritance
Gregor Mendel, conducted hybridisation experiments on garden peas and proposed the laws of inheritance in living organisms.
| Mendel selected 14 true-breeding pea plant varieties, as pairs with contrasting traits. |
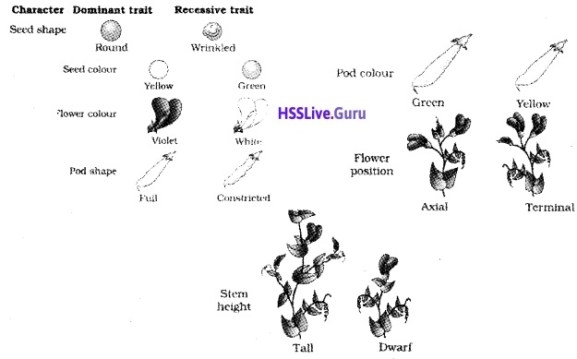
![]()
Inheritance Of One Gene
Mendel crossed tall and dwarf pea plants to study the inheritance of one gene. He collected the seeds produced as a result of this cross and grew them to generate plants of the first hybrid generation. This is called the Filial progeny or the F1.
| The F1 progeny plants were tall. Mendel then self-pollinated the tall F1 plants and to raise the second Filial generation The result was that 3 tall and 1 dwarf. |
Based on these observations,
Mendel proposed that ‘factors’ (genes) transmitted from parent to offspring through the gametes, over successive generations.
Genes which code for a pair of contrasting traits are known as alleles, i.e., they are alternative forms of the same gene.

![]()
Figure: A Punnett square used to understand a typical monohybrid cross conducted by Mendel between true-breeding tall plants and true-breeding dwarf plants.
According to Mendels experiment, true breeding tall are identical or homozygous TT and true breeding dwarf pea variety are also homozygous tt.
TT and tt are called the genotype of the plant while the terms tall and dwarf are the phenotype.
The production of gametes and the formation of the zygotes in the F1 and F2 plants can be understood from a diagram called Punnett Square.
The possible gametes are written on two sides, usually the top row and left columns. All possible combinations are represented in boxes below in the squares.
In the cross of tall TT(male) and dwarf tt (female) plants, the gametes produced by them are represented by T and t respectively. The all F1 is Tt progeny.
![]()
The F1 plants of genotype Tf are self-pollinated. They produces gametes of the genotype T and fin equal proportion. When fertilisation takes place, the pollen grains of genotype T have a 50 percent chance to pollinate eggs of the genotype T, as well as of genotype t.
| At F2, 3/4th of the plants are tall ,(of which 1/2 are Tt and only 1/4th are TT) and 1/4th are dwarf tt, i.e., phenotypic ratio is 3:1. and the genotypic ratio is 1 : 2 : 1. |
From the Punnet square it is clearthat 1/4th of the random fertilisations lead to TT, 1/2 lead to Tt and 1/4th to tt.
| For determining the genotype of a tall plant at F2, Mendel crossed the tall plant from F2 with a dwarf plant. This is called a test cross. |
Diagrammatic representation of a test cross:

Based on his observations on monohybrid crosses Mendel proposed two general rules first law is Law of Dominance and the Second Law or Law of Segregation.
1. Law of Dominance:
| (i) Characters are controlled by discrete units called factors. |
| (ii) Factors occur in pairs. |
| (iii) In a dissimilar pair of factors one member of the pair dominates (dominant) the other (recessive). |
The law of dominance explains the ratio of 3:1 in F2.
2. Law of Segregation:
| According to these law the parents contain two alleles, during gamete formation, alleles of a pair segregate from each other and the gamete receives only one of the two alleles. |
A homozygous parent produces all gametes that are similar while a heterozygous one produces two kinds of gametes.
![]()
Non mendelian inheritance:
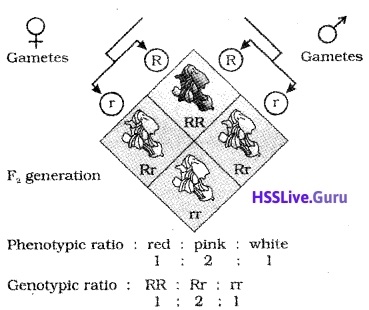
a. Incomplete Dominance:
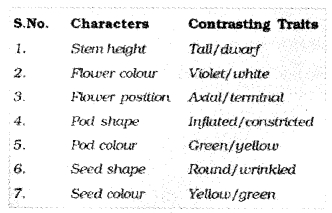
F1 phenotype not resemble either of the two parents The inheritance of flower colour in the dog flower (snapdragon or Antirrhinum sp.) is a good example.
In a cross between true-breeding red-flowered (RR) and true breeding white-flowered plants (rr), the F1 (Rr) was pink.
Explanation of the concept of dominance:
Here the normal allele produces the normal enzyme that is needed for the transformation of a substrate S the modified allele is responsible for production of –
- the normal/less efficient enzyme, or
- a non-functional enzyme, or
- no enzyme at all
In the case(i), the modified allele is equal to the unmodified allele,

![]()
Figure: Results of monohybrid cross in the plant Snapdragon, where one allele is incompletely dominant over the other allele.
But in the case (ii) and (iii) if the allele produces a non-functional enzyme or no enzyme, the phenotype may be effected.
The unmodified (functioning) allele, which represents the original phenotype is the dominant allele and the modified allele is the recessive allele. So the recessive trait arise due to non-functional enzyme or because no enzyme is produced.
b. Co-dominance
Here F1 generation resembles both parents. A good example is different types of red blood cells that determine ABO blood grouping in human beings.
ABO blood groups are controlled by the gene I. The gene (I) has three alleles IA, IA and i. The alleles IA and IB produce a slightly different form of the sugar while allele i doesn’t produce any sugar.
So IA and IB are completely dominant over i, and when IA and i are present only IA expresses and when IB and i are present IB expresses.
when IA and IB are present together they both express their own types of sugars: this is because of codominance.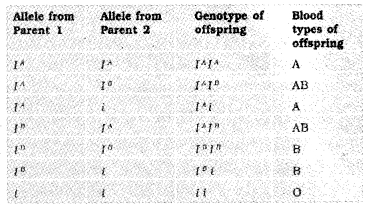
| ABO blood grouping is a good example of multiple alleles. Here a single gene produce more than one effect. |
For example, starch synthesis in pea seeds is controlled by one gene. It has two alleles (B and b). Starch is synthesised by BB homozygotes and bb homozygotes have lesser efficiency in starch synthesis.
After maturation of the seeds, BB seeds are round and the bb seeds are wrinkled. Heterozygotes produce
round seeds, and so B seems to be the dominant allele. But, the starch grains produced are of intermediate size in Bb seeds.
![]()
Inheritance Of Two Genes
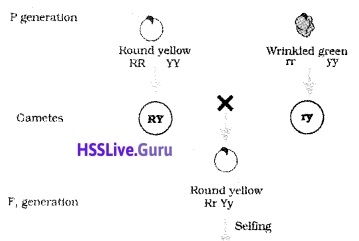
Mendel crossed pea plant seeds with yellow colour and round shape and seeds of green colour and wrinkled shape. Yellow colour was dominant over green and round shape dominant over wrinkled.
Y for dominant yellow seed colour and y for recessive green seed colour, R for round shaped seeds and r for wrinkled seed shape. The genotypes of the parents are RRYY and rryy.
| The gametes RY and ry unite on fertilisation to produce the F1 hybrid RrYy. When Mendel self hybridised the F1 plants and found that the ratio in F2 is 9:3:3:1. |
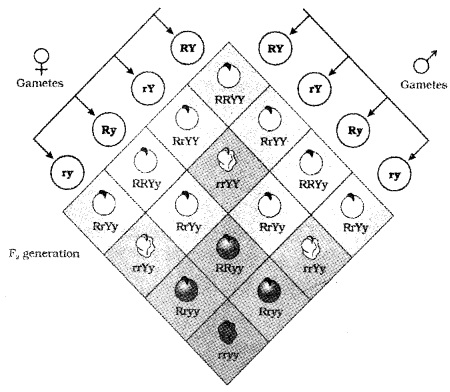
Phenotypic ratio: round yellow(9) : round green(3) : wrinkled yellow (3) : wrinkled green(1).
Figure: Result s of a dihybrid cross where the two parents differed in two pairs of contrasting traits: seed colour and seed shape.
1. Law of Independent Assortment:
Based on dihybrid crosses (crosses between plants differing in two traits) Mendel proposed Law of Independent Assortment.
The law states that when two pairs of traits are combined in a hybrid, segregation of one pair of characters is independent of the other pair of characters’.
![]()
In the dihybrid cross the phenotypes round-yellow; Wrinkled- yellow; round- green and wrinkled- green appeared in the ratio 9:3:3:1.
The segregation of 50 percent R and 50 per cent ris independent from the segregation of 50 percent Y and 50 percent y. Therefore, 50 percent of the r bearing gamete has Y and the other 50 percent has y.
Similarly, 50 percent of the R bearing gamete has Yand the other 50 percent hasy. Thus there are four genotypes of gametes (four types of pollen and four types of eggs). The four types are RY, Ry, rY and ry.
2. Chromosomal Theory of Inheritance:
According to Mendel law, factors (genes) are discrete units, but its existence was not proved In 1900, three Scientists (de Vries, Correns and von Tschermak) independently rediscovered Mendel’s results on the inheritance of characters.
Walter Sutton and Theodore Boveri noted that the behaviour of chromosomes was parallel to the behaviour of genes and used chromosome movement to explain Mendel’s laws.
| The chromosomes as well as genes occur in pairs. The two alleles of a gene pair are located on homologous sites on homologous chromosomes. During Anaphase of meiosis I, the two chromosome pairs can align at the metaphase plate independently of each other. So the pairing and separation of a pair of chromosomes would lead to the segregation of a pair of factors they carried. |
Sutton united the chromosomal segregation with Mendelian principles and called as chromosomal theory of inheritance.
Experimental proof for the chromosomal theory of inheritance was given by Thomas Hunt Morgan and his colleagues. This led to discovery that variation occurs during sexual reproduction His studies were conducted on tiny fruit files, Drosophila melanogaster.
![]()
| They have short life cycle (two weeks), and a single mating could produce a large number j of progeny flies. The male and female flies are distinguishable and hereditary variations can be seen. |
3. Linkage and Recombination:
Morgans dihybrid crosses in Drosophila reveals genes that are sex-linked.
| For example yellow-bodied, white-eyed females crossed with brown-bodied, red-eyed males and intercrossed their F1 progeny. The F2 ratio was different from the expected 9:3:3:1. Because the two genes are not segregated independently located on the X same chromosome. |
They found that some genes were very tightly linked (showed very low recombination), while others were loosely linked (showed higher recombination).
| For example the genes for the white and yellow were very tightly linked and showed only 1.3 per cent recombination while white and miniature wing showed 37.2 per cent recombination. |

His student Alfred Sturtevant found that frequency of recombination between gene pairs on the same chromosome is equivalent to the distance between genes and ‘mapped’ their position on the chromosome.
![]()
Sex Determination
Henking (1891) studied the spermatogenesis in an insects and X body. The ‘X body’ of Henking was given the name X-chromosome (sex chromosome).
Grasshopper is an example of XO type of sex determination in which the males have only one X-choromosome besides the autosomes, whereas females have a pair of X-chromosomes.
Insects and mammals including man:
XY type of sex determination is seen where both male (XY- heterogametic) and female (XX- homogametic) have same number of chromosomes. Both males and females bear same number of autosomes. i.e males have autosomes plus XY, while female have autosomes plus XX.
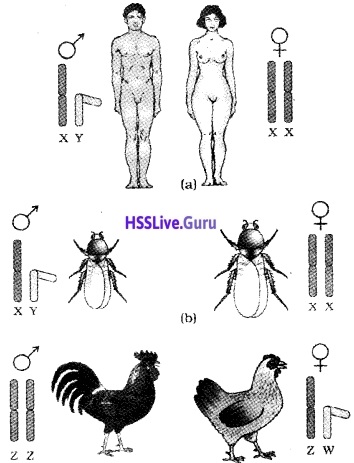
Male heterogamety:
In XO type and XY type, males produce two different types of gametes, Such types of sex determination mechanism is seen in drosophila and human male respectively.
Female heterogamety:
In birds the total number of chromosome is same in both males and females. But females produce two types of gametes.
Female birds have one Z and one W chromosome, where as males have a pair of Z-chromosomes besides the autosomes.
![]()
1. Sex Determination in Humans:
Out of 23 pairs of chromosomes, 22 pairs are same in both males and females; these are the autosomes. A pair of X-chromosomes are present in the female, whereas X and Y chromosome are present in males.
During spermatogenesis two types of gametes are produced of which 50 per cent carry the X- chromosome and the rest 50 per cent has Y-chromosome besides the autosomes.
Females produce only one type of ovum with an X-chromosome. In case the ovum fertilises with a sperm carrying X-chromosome the zygote develops into a female (XX) and with Y-chromosome results into a male offspring.
| Thus the genetic makeup of the sperm that determines the sex of the child. |
Mutation
It is the sudden change in the genetic make up of an organism. The loss (deletions) or gain (insertion/ duplication) of a segment of DNA, result in alteration in chromosomes. Alteration in chromosomes results in abnormalities or aberrations.
| If the mutation also arise due to change in a single base pair of DNA. This is known as point mutation. Eg- sickle cell anemia. |
| Deletions and insertions of base pairs of DNA, causes frame-shift mutations. |
There are many chemical and physical factors that induce mutations. They are called as mutagens. Eg- physical mutagen – UV radiations.
![]()
Genetic Disorders
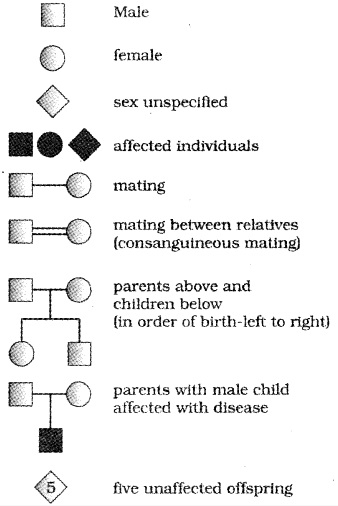
1. Pedigree Analysis:
It is the study of the family history of inheritance of a particular trait. Such an analysis of traits in a several of generations of a family is called the pedigree analysis. For this the standard symbols are used.
In human beings it helps to trace the inheritance of a specific trait, abnormality or disease. A number of disorders in human beings have been found to be associated with the inheritance of altered genes or chromosomes.

2. Mendelian Disorders:
Genetic disorders are classified into two categories. Mendelian disorders and Chromosomal disorders.
| Mendelian disorders (dominant or recessive) arise by alteration or mutation in the single gene. |
| Eg-Haemophilia, Cystic, fibrosis, Sickle-cell anaemia, Ctflour blindness, Phenylketonuria, Thalesemia, etc. |
| The pattern of inheritance can be traced in a family by the pedigree analysis. |
Haemophilia:
Haemophilia is the X-linked recessive trait that is transmitted from carrier female to male progeny in the zig-zag manner (Sex linked recessive disease) This is the bleeders disease mainly observed in family of Queen Victoria.
![]()
In an affected individual a simple cut will result in non-stop bleeding. The heterozygous female (carrier) for haemophilia transmit the disease to sons.
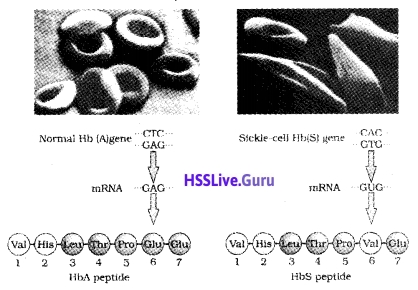
Sickle-cell anaemia:
This is an autosome linked recessive trait transmitted from parents to the offspring when both the partners are carrier for the gene. The disease is controlled by a single pair of allele, HbA and HbS.
The homozygous individuals for HbS (HbSHbS) show the diseased phenotype. Heterozygous (HbAHbS) individuals are carrier of the disease.
The defect is caused by the substitution of Glutamic acid by Valine at the sixth position of the beta globin chain of the haemoglobin molecule.
It is due to the single base substitution at the sixth codon of the beta globin gene from GAG to GUG.
The mutant haemoglobin molecule under low oxygen tension causing the change in the shape of the RBC from biconcave disc to elongated sickle like structure.
Phenylketonuria:
This is an autosomal recessive trait. This is due to the deficiency of enzyme that converts the amino acid
phenylalanine into tyrosine. As a result of this phenylalanine is accumulated and converted into phenylpyruvic acid.
Accumulation of these in brain results in mental retardation. These are also excreted through urine.
![]()
3. Chromosomal disorders:
Failure of segregation or non-disjunction of chromosomes during cell division results in the gain or loss of a chromosome(s), called aneuploidy. For example
| Down’s syndrome is the gain of extra copy of chromosome 21 and Turner’s syndrome is due the loss of an X chromosome in human females. |
Failure of cytokinesis results in an increase in a whole set of chromosomes in an organism. This phenomenon is known as polyploidy. This is mainly seen in plants.
If an additional copy of a chromosome is added. This is called trisomy Eg- Down’s Syndrome and Klinefelter’s syndrome or lack of copy of a chromo^ome( monosomy) Eg- Turner’s syndrome.
Down’s Syndrome: (Trisomy of 21):
The affected individual is short statured with small round head, furrowed tongue and partially open mouth. Palm is broad with characteristic palm crease. Physical, psychomotor and mental development is retarded.
![]()
Klinefelter’s Syndrome:
This is due to the trisomy of sex chromosome 44 autosomes+XXY. Individuals show feminine development i.e development of breast, i.e., Gynaecomastia Such individuals are sterile.
Turner’s Syndrome:
This is due to absence of one of the X chromosomes, i.e. 44 autosomes+ XO, Such females are sterile. The ovaries are rudimentary and lack other secondary sexual characters.